


This snake robot could hunt alien life on icy moons like Saturn’s Enceladus (Image Credit: Space.com)
Forget snakes on a plane; a new project is working on snakes on alien terrain.
A slithering serpent could explore extreme terrain in icy moons like Enceladus at Saturn, according to team members from NASA’s Jet Propulsion Laboratory (JPL) in California. Enceladus is famous for spouting water through its icy crust, and is one of the top spots to search for life in the solar system.
To navigate the crumpled moon’s surface, the Exobiology Extant Life Surveyor (EELS) is designed to use several rotating segments connected in a series, to twist and bend itself like a snake across terrain otherwise impassable by rovers and other agile landers.
The JPL EELS team is using a “startup” mentality to move swiftly on the project, which is in early stages and not approved yet for a funded mission. “Build quickly, test often, learn, adjust, repeat,” officials said on a Monday (May 8) post on the JPL website (opens in new tab), adding eerie video of the serpentine robot in action.
Related: Alien-life hunters are eyeing icy ocean moons Europa and Enceladus

(opens in new tab)
The rotating segments on EELS are wrapped in screw threads, which it uses to propel itself over a variety of surfaces. EELS’ snake-like ability to move those segments independently allows the robot to exert pressure against the confines of tight spaces, to climb or descend areas conventional equipment would be incapable of reaching.
“It has the capability to go to locations where other robots can’t go,” sid EELS project manager Matthew Robinson in the JPL statement. “Though some robots are better at one particular type of terrain or other, the idea for EELS is the ability to do it all.”
EELS has undergone several iterations, with the research team testing which materials and design specifications are best. The current version of the robot consists of 10 rotating segments, propelled by wider, 8-inch (20-centimeter) plastic screws for testing over looser terrain, and sharper metal screws for gaining traction in icy conditions.
So far, the team has tested EELS in several challenging environments: an ice rink, the sandy Mars Yard at JPL used for rover training, and even a “robot playground” setup at a ski resort in southern California.
Related: Slithering snake robots on Mars could aid future rovers

(opens in new tab)
The robot’s head will feature cameras and lidar to help EELS analyze and traverse different environments, part of which involves creating 3D maps of its surroundings. To test this, EELS researchers lowered a prototype of the snake-robot’s head into a glacial crack not dissimilar to one EELS might encounter on one of its primary targets: Saturn’s moon Enceladus.
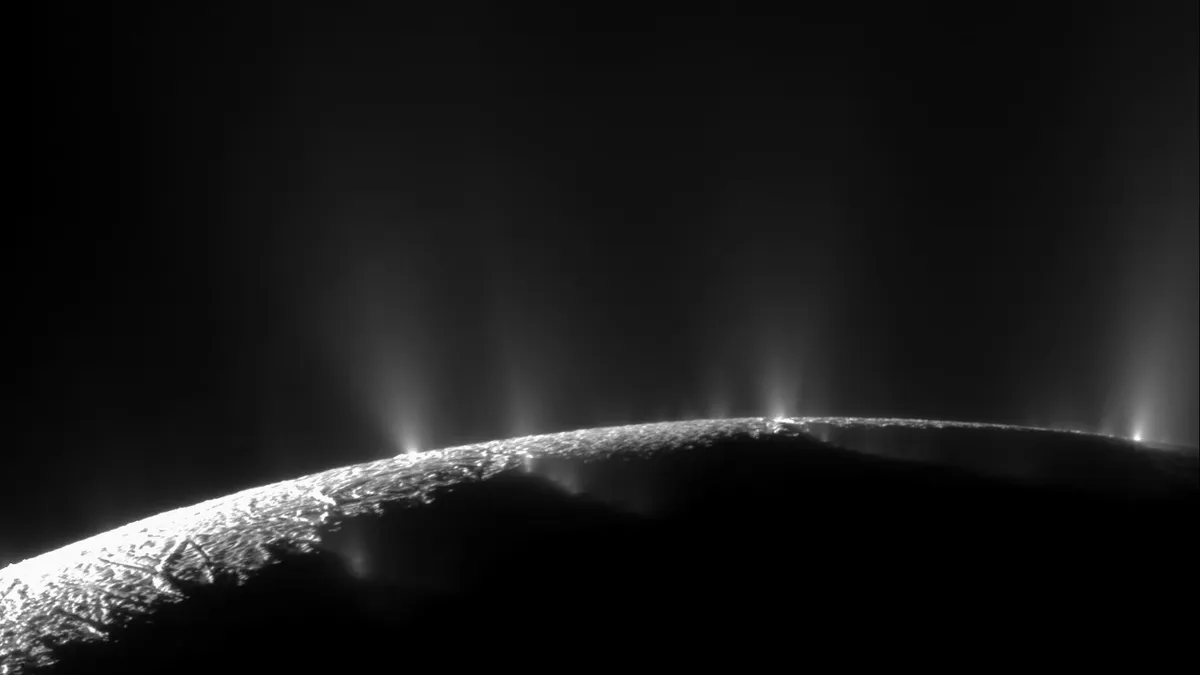
Enceladus is an icy moon orbiting our solar system’s most prominently-ringed planet. Its surface is covered in long cracks known as tiger stripes, which spew jets of water from oceans beneath the miles-thick ice. These jets are expelled with such force that one of Saturn’s rings is comprised of the ice particles ejected from Enceladus’ orbit.
NASA measurements have detected large amounts of organic material within these plumes, and the space agency has tapped Enceladus as a major contender amongst planetary bodies in our solar system capable of supporting life. NASA will be counting on EELS to wriggle its way through the surface ice of Enceladus to hunt for the proof.
Related: NASA has a life-detecting instrument ready to fly to Europa or Enceladus
(opens in new tab)
In addition to being highly maneuverable, EELS will also need to be fully autonomous. On average, a radio signal takes about 1.5 hours to traverse the distance between Saturn and Earth.
This time delay means EELS will need to interpret its surroundings, assess possible dangers, discern possible travel routes, differentiate and select targets for gathering data, and even recover from unexpected events — all completely autonomously. The EELS team began monthly hardware and software tests during 2022, largely to improve its independence skills.
“The robot has to figure out what the road is, and try to follow it,” said Rohan Thakker, autonomy lead for the EELS project at JPL in the same statement, adding, “then it needs to go down a 100-foot drop and not fall.”

(opens in new tab)
EELS may also have applications much closer to home than Enceladus. The JPL team anticipate EELS’ adaptability being useful to researchers on Earth studying environments like glaciers and caves. It could also pivot to explore underground lava tubes and other subsurface geological features on closer worlds, like the moon and Mars.
Beyond its navigational sensors, no additional scientific equipment has been tested using EELS. “Our focus so far has been on autonomous capability and mobility, but eventually we’ll look at what science instruments we can integrate with EELS,” Robinson said.
Right now, with its 10-segment variant, EELS weighs about 220 pounds (100 kilograms), and measures 13 feet (4 meters) long. In the robot’s final design, up to 48 actuators will be used to allow EELS greater flexibility than the current version, with room for research equipment and increasingly complex configurations to navigate unforgiving terrains.
While it’s unclear when EELS or similar technology could fly to Enceladus, the most recent decadal survey for planetary science in 2022 (opens in new tab) suggested a flagship “orbilander” mission to Enceladus, meaning an orbiter and lander combination. The lander could last up to two years on the surface and would arrive in the 2050s, assuming mission planning begins in earnest in the late 2020s. Uranus and its moons, however, ranked as a higher priority for visitation.
Follow us @Spacedotcom (opens in new tab), or on Facebook (opens in new tab) and Instagram (opens in new tab).






